垂直/短距起降飞行器设计技术
一、成果简介
固定翼和直升机分别代表了目前飞行器的两个大类,各自具有各自的优势,同时也存在自己的弱项,目前对垂直/短距起降飞行器需求的呼声越来越高,这类飞行器结合了固定翼高速平飞和直升机垂直起降、悬停的特点,不仅在军事上具有实际需求,在民用方面也有广阔的应用前景。
围绕垂直/短距起降飞行器的总体布局、气动效能、飞机结构轻量化和飞行控制,探索新的倾转动力、组合动力、分布动力布局,研究轻量化结构、仿生结构以及仿生结构的气动特性和机理,寻求高速、高精度的控制算法和控制方法等方面取得了卓有成效的研究成果。提出了倾转翼飞机布局,提出了柔性体自推进机理,研究了时变、强耦合对象的控制方法,针对3D打印工艺结合仿生学进行的结构轻量化研究以取得初步成果。此外,在高超目标建模和气动计算方面已初见成效。
二、主要技术指标
方向 | 具体内容 | 方向成员 |
总体布局与气动计算仿真 | 1、提出了倾转翼飞机布局,并获国家发明专利; 2、提出了柔性体在涡街中的四种运功规律,提出了柔性体自推进理论; 3、提出蜻蜓翼柔性微结构对飞行的作用机理。 | 王琦 何国毅 杨佑绪 |
结构强度与轻量化研究 | 1、完成了最完整的蜻蜓前后翅三维褶皱模型; 2、提出了桁架结构轻量化协作优化算法; 3、基于仿生学研究了类竹结构在结构轻量化中应用。 | 何国毅 王琦 杨佑绪
|
优化算法与飞行控制 | 1、采用无模型控制方法,解决了倾转翼飞机时变、强耦合的控制问题; 2、提出了非仿射约束鲁棒自适应控制方法; 3、揭示了蜻蜓前后翼的相互运动与蜻蜓运动的关系。 | 陈龙胜 王琦 杨佑绪 何国毅 |
高超飞行器建模与气动计算 | 1、初步建立了高超飞行器气动仿真工程计算方法; 2、建立了高超飞行器具有纯反馈特性的非线性切换数学模型; 3、设计了高超飞行器鲁棒自适应抗干扰控制器。 | 何国毅 陈龙胜 王琦 |
三、应用情况概述
1、总体布局与气动计算仿真:总体布局和气动计算仿真往往都是紧密结合在一起的。本团队提出的倾转翼飞机国家发明专利内容,有机地结合了固定翼和直升机的特点种起降空间小,飞行速度要求高的环境中,现正在和两家企业洽谈成果转化问题,有效降低了垂直飞行模式下的气动阻力,大大提高了气动效率,可用于军民领域各微结构为蜻蜓翼提供了刚度并保持了一定的韧性,有效展示了蜻蜓的飞行本领。;柔性体在涡街中的运动模式和柔性自推进理论为扑翼机研究和编队飞行减阻提供了理论依据;目前正在进行分布式动力短距起降飞行器的研究。

图1 倾转翼无人机
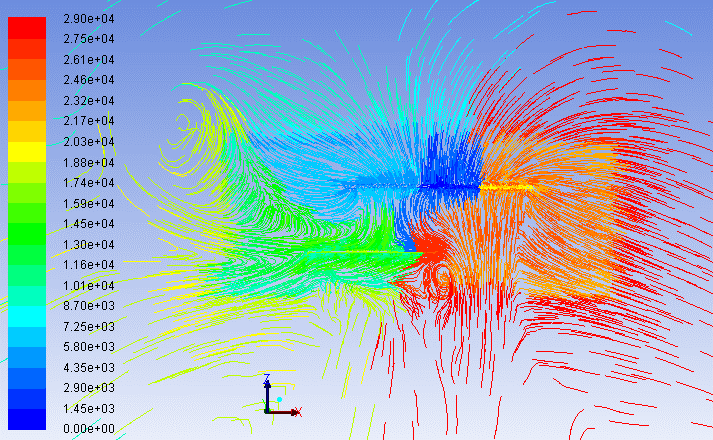
图2 倾转旋翼飞机旋翼与机翼气动干扰流线图

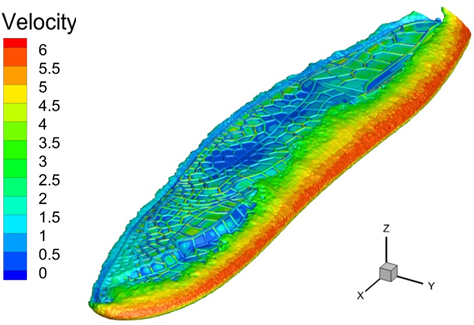
图3 真实的蜻蜓翼模型 图4 蜻蜓前翼的流场涡量云图
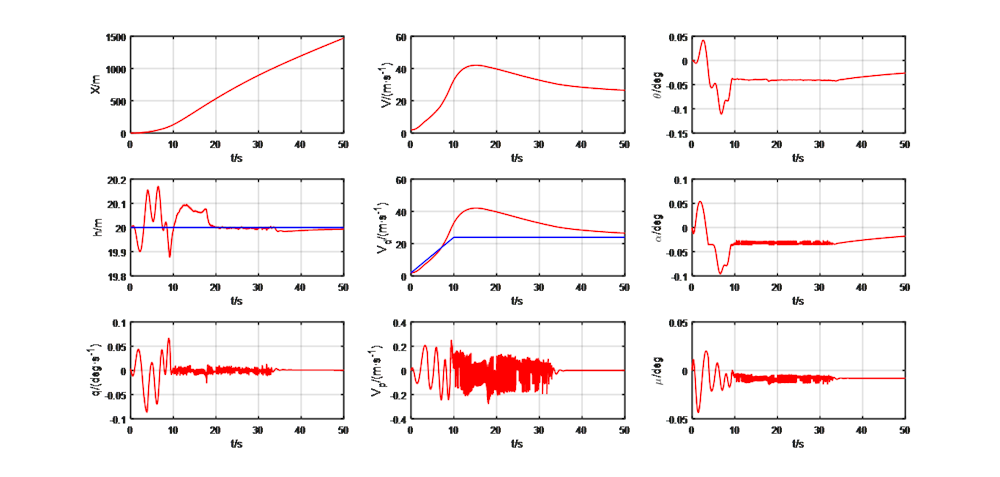
图5 倾转旋翼无人机过渡段高度控制过程曲线
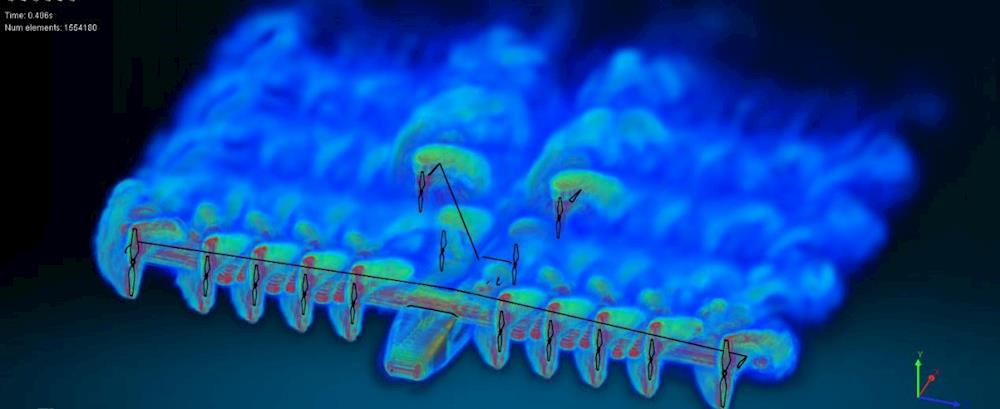
图6 分布式动力流场仿真图
2、结构强度与轻量化研究:蜻蜓翼具有结构重量轻,气动效能高的特点,蜻蜓翼的三维褶皱系统有效提高了蜻蜓翼的刚度,同时又具有一定的柔性,项目的研究揭示了蜻蜓翼扑动过程的动力学原理;飞机结构设计都是以满足强度、刚度前提下重量最轻为目标的。除了以往采用结构优化方法以外,一方面,随着3D打印技术的成熟,中空结构的设计越来越被人们所重视;另一方面对结构进行仿生学研究也是目前研究的热点之一。本项目组研究成果可对飞机中广泛采用的桁架式结构及实心结构进行轻量化设计。通过降低飞机重量,充分利用机翼的柔性,可大大提高飞机经济型和飞行性能;首次开展了螺旋颤振风洞试验,解决了型号研制的技术难题,缩短了研制周期,节省了经费,保证了型号的安全,为未来螺旋桨类飞机研制提供了技术支撑,可进行飞机结构颤振分析也研究。
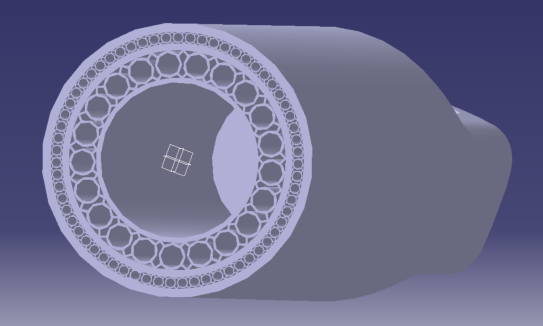

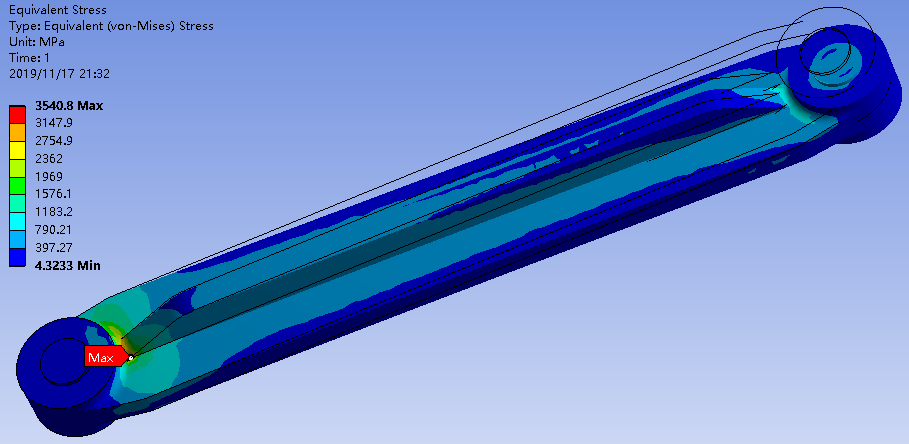

图7 仿竹结构与优化结果
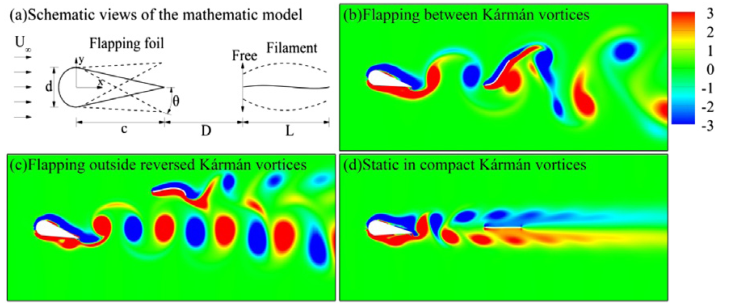
图8 柔性细丝在流场中运动的三种模态
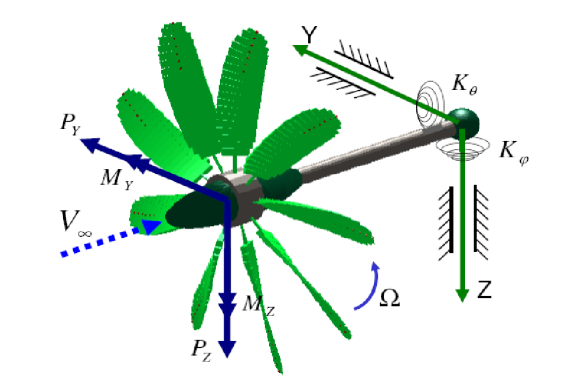
图9 螺旋颤振分析和风洞模型图
3、优化算法与飞行控制:飞机总体优化和结构优化是个多学科优化的过程,涉及到结构、气动、重量、性能等多个相互作用、相互耦合的学科,采用多学科协作优化可大大提高优化效率,提高优化可靠性;飞行器控制系统的设计过程也是一个优化的过程,而且控制方法非常关键,本项目组研究的多学科协作优化和非仿射约束鲁棒自适应控制方法可广泛用于各种飞行器的控制器设计;蜻蜓翼前后翼的扑动频率和相位以及迎角直接影响蜻蜓飞行的运动和效率,本项目组的研究为仿蜻蜓扑翼飞行器提供了理论依据。
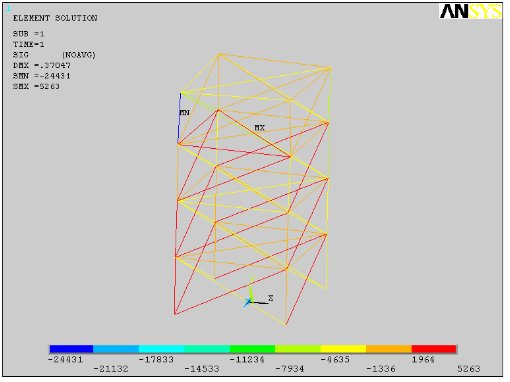
图10 72杆桁架结构优化结果,减重5%
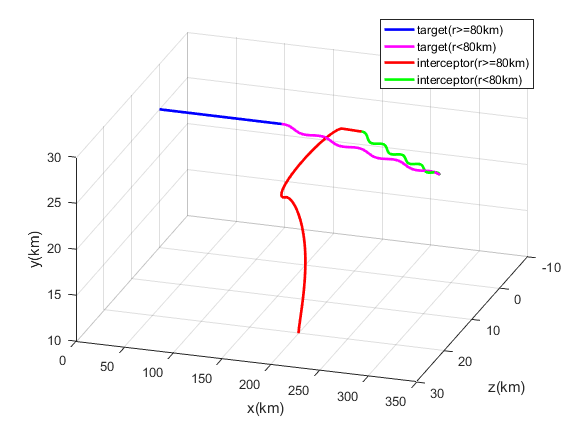
图11 采用滑膜变结构方法设计的制导率弹目拦截轨迹
4、高超飞行器建模与气动计算:高超飞行器是目前研究的热点,但都处于摸索阶段,本项目组首次建立了高超飞行器的气动工程计算方法,同时建立了非线性切换数学模型,并已设计完成了一种鲁棒自适应抗干扰控制器。项目组的研究为高超飞行器研究进入工程研究阶段打下了基础。
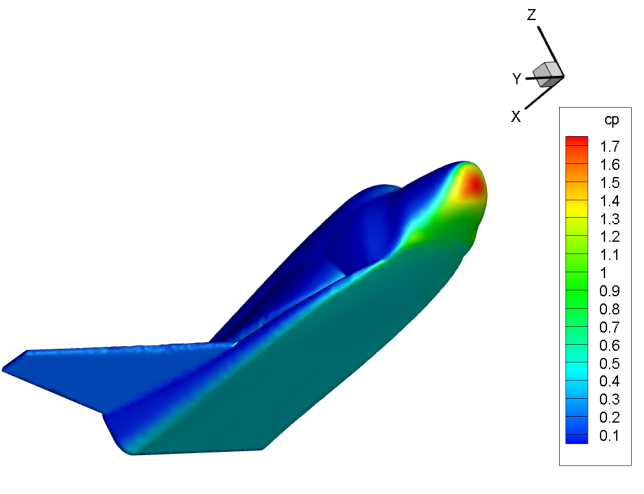
图12 高超升力体表面压力云图
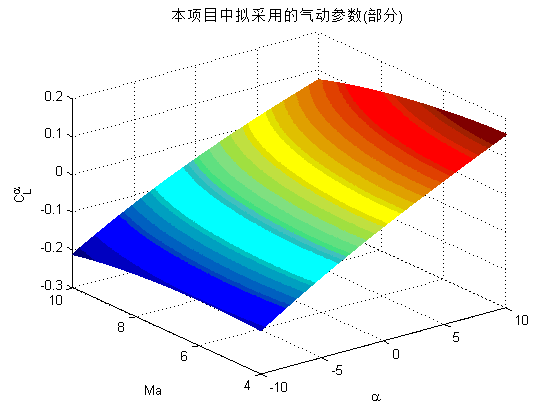
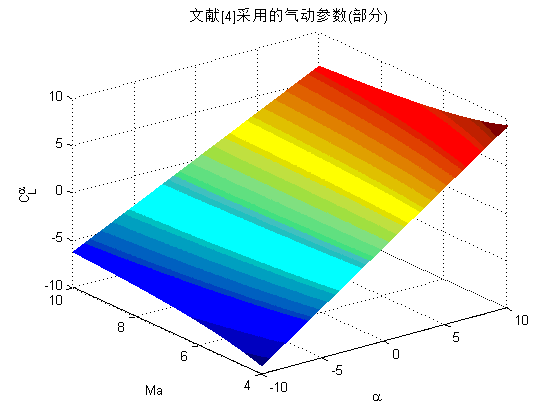
图13 高超声速飞行器部分气动参数对比分析(非仿射与仿射)
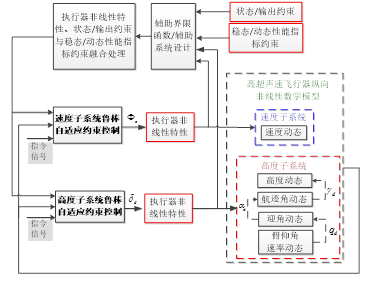
图14 高超声速飞行器的鲁棒自适应控制原理图
可以承担任务:
1、新布局飞行器的设计与分析;
2、结构轻量化设计与颤振分析;
3、中低速和高超飞行器的气动分析与仿真;
4、飞行器控制器设计;
四、依托科研项目及技术成果支撑情况
1、依托科研项目情况
序号 | 项目名称 | 项目负责人 | 项目类别
| 立项时间 | 经费总额 (万元) | 项目委托单位 |
1 | 三维柔性皱褶蜻蜓翼气动效能机理研究 | 何国毅 | 国家自然科学基金 | 2019年 | 33 | 国家自然科学基金委 |
2 | 柔性细丝自推进同步运动的流体力学机理 | 何国毅 | 国家自然科学基金 | 2015年 | 50 | 国家自然科学基金委 |
3 | 可渗透壁面对层流翼型声涡相互作用调控机制研究 | 刘勇 | 国家自然科学基金 | 2020年 | 30 | 国家自然科学基金委 |
4 | 多约束纯反馈非线性系统鲁棒自适应抗干扰控制及在高超声速飞行器中的应用 | 陈龙胜 | 国家自然科学基金 | 2020年 | 30 | 国家自然科学基金委 |
5 | 倾转翼飞机关键技术的研究
| 王琦 | 江西省科技厅主管项目 | 2015年 | 30 | 江西省科技厅 |
6 | 基于弹性自由飞行模型的气动弹性响应综合试验验证技术研究 | 杨佑绪 | 陕西省特支计划基金 | 2018年 | 150 | 陕西省委 |
2、授权发明专利及软件著作权
序号 | 发明专利/软件著作名称 | 第一完成人 | 专利类型 | 授权日期 |
1 | 一种新型倾转翼飞机 | 王琦 | 发明专利 | 2017.04.24 |
3、论文和著作成果
序号 | 论文/著作名称 | 刊名/出版社名 | 第一作者 | 发表时间 |
1 | Dynamic response of a semi-free flexible filament in the wake of a flapping foil | Journal. Fluids and Structures | 何国毅 | 2018.11 |
2 | 蜻蜓滑翔时柔性褶皱前翅气动特性分析 | 力学学报 | 何国毅 | 2019.01 |
3 | Hydrodynamic studies on two wiggling hydrofoils in an oblique arrangement | Acta Mechanica Sinica
| 何国毅 | 2018.06 |
4 | Asymmetric prescribed performance‐barrier Lyapunov function for the adaptive dynamic surface control of unknown pure‐feedback nonlinear switched systems with output constraints. | International Journal of Adaptive Control & Signal Processing | 陈龙胜 | 2018.10 |
5 | Prescribed performance-barrier Lyapunov function for the adaptive control of unknown pure-feedback systems with full-state constraints | Nonlinear Dynamics | 陈龙胜 | 2019.02 |
6 | Prescribed performance adaptive robust control for a class of uncertain non-affine pure feedback system | Nonlinear Dynamics | 陈龙胜 | 2017.02 |
五、联系方式
联系人:何国毅
地址及邮编:江西省南昌市丰和南大道696号 南昌航空大学飞行器工程学院,邮编:330063
Email:70190@nchu.edu.cn
联系电话:138******3628